Гуманоид-робот освоил человеческую походку
Adam представляет собой двуногого робота, который был спроектирован с учетом мощных приводов и экономичной модульной конструкции. Он обучается передвижению, подражая движениям человека, что является важным шагом в развитии гуманоидных роботов.
Традиционные робототехнические системы, основанные на точных математических моделях и заранее заданных планах движений, могут быть эффективными в предсказуемых условиях. Однако в сложных и динамичных средах они теряют свою продуктивность. Решение этой проблемы предлагает использование глубокого обучения с подкреплением (RL), которое позволяет роботам самостоятельно обучаться на основе взаимодействия с окружающей средой. Хотя этот метод успешно применялся для четвероногих роботов, его внедрение в гуманоидные устройства является более сложной и затратной задачей.
В результате работы команды PNDbotics был создан Adam, гуманоид с 25 силовыми приводами, использующий квази-прямое управление (QDD), что обеспечивает ему высокую мобильность и адаптивность. Его ноги способны развивать крутящий момент до 360 Нм благодаря высокочувствительным актуаторам, а руки имеют пять степеней свободы и три степени свободы в области талии.
Эффективное управление телом Adam стало возможным благодаря уникальным характеристикам, включая модульную конструкцию, торс, имитирующий человеческую анатомию, и специализированную систему управления. Эта система включает в себя блок управления на процессоре Intel i7 и сеть PDN, которая распределяет электроэнергию между компонентами робота.
Хотя для Adam возможно добавить функции зрения и манипуляторы, главной задачей разработки было обучение его передвижению без визуальных ориентиров.
Команда откалибровала данные под специфику конструкции Adam и интегрировала высокоточную запись специально разработанных движений в открытые дата-сеты, что значительно улучшило процесс обучения и оптимизировало модель.
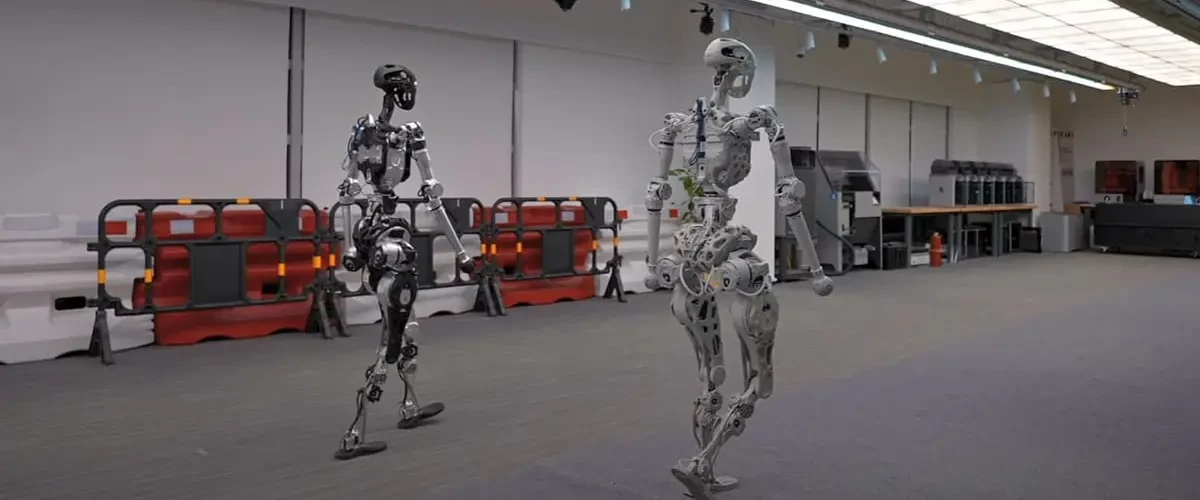
Использование подхода на основе обучения с подкреплением значительно повысило адаптивность робота по сравнению с традиционными методами управления походкой. Adam в реальном времени регулирует длину шага, скорость и баланс, даже когда передвигается по неровным участкам. Алгоритм RL обеспечивает плавность движений и согласованность работы суставов, что способствует уменьшению износа и увеличению срока службы, а также улучшает энергоэффективность.
Обсудим?
Смотрите также: